Hello there, I’m Yan (炎)
I am a final-year PhD student at EPFL and also working as a research assistant in the Robot Learning & Interaction group at Idiap, supervised by Dr. Sylvain Calinon and Prof. Colin Jones.

I aim to build intelligent robot assistants living together with humans at home. I am currently working on integrating task and motion planning with robot learning for multi-object manipulation tasks. My research interests include robot learning, multi-object manipulation planning, task and motion planning, and graph theory. My previous research experiences cover imitation learning, deep reinforcement learning, sim2real transfer, and variable impedacne control in robot manipulators and legged robots. See Projects for more details.
Recent News
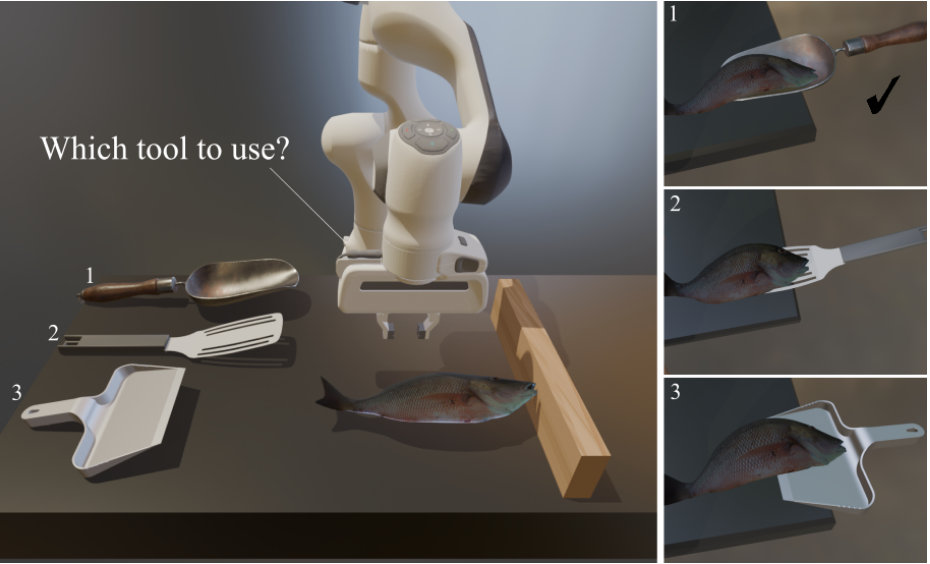
- 2026.01: Our paper Robust Tool Selection and Manipulation is accepted to ICRA 2026!
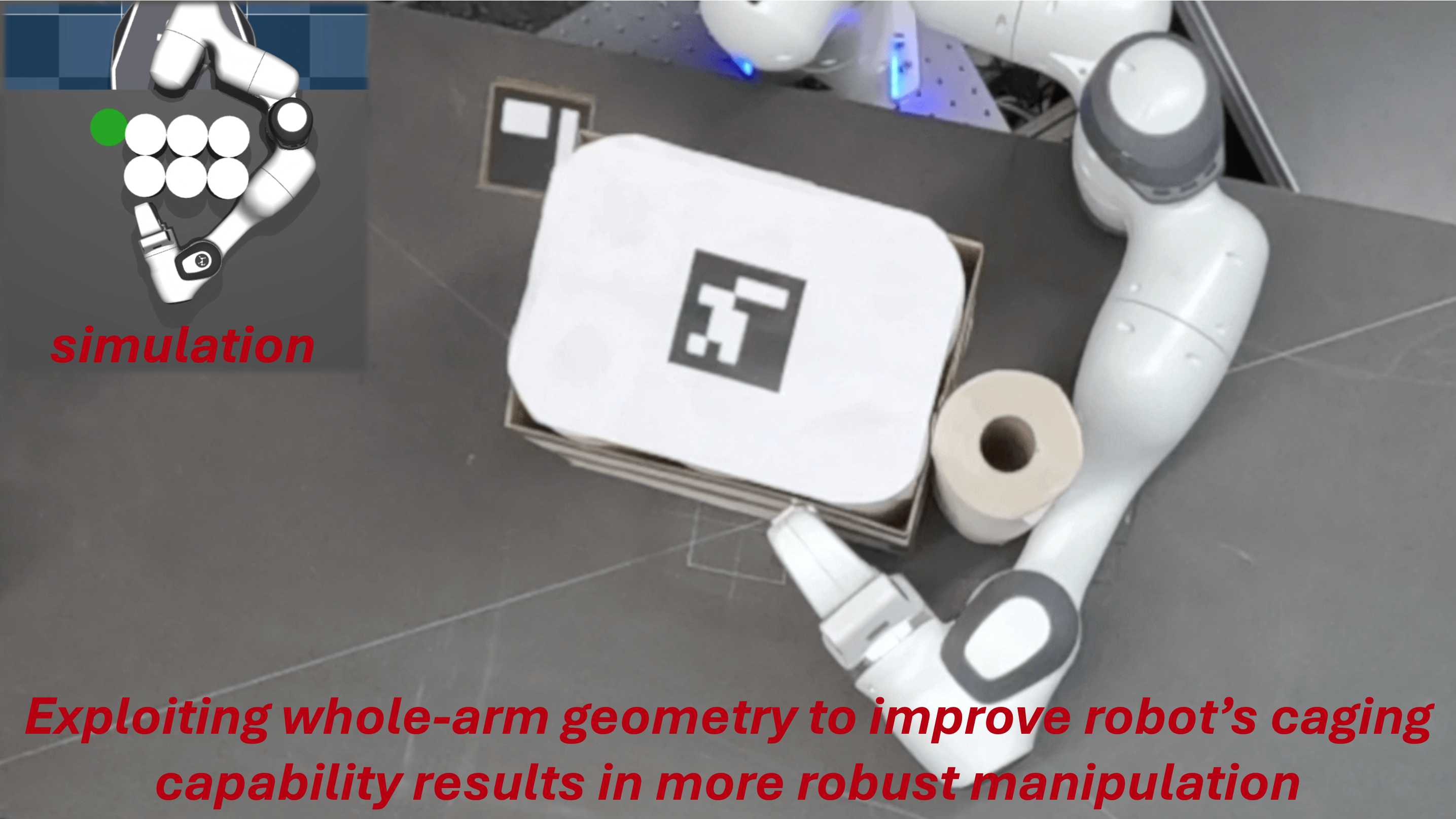
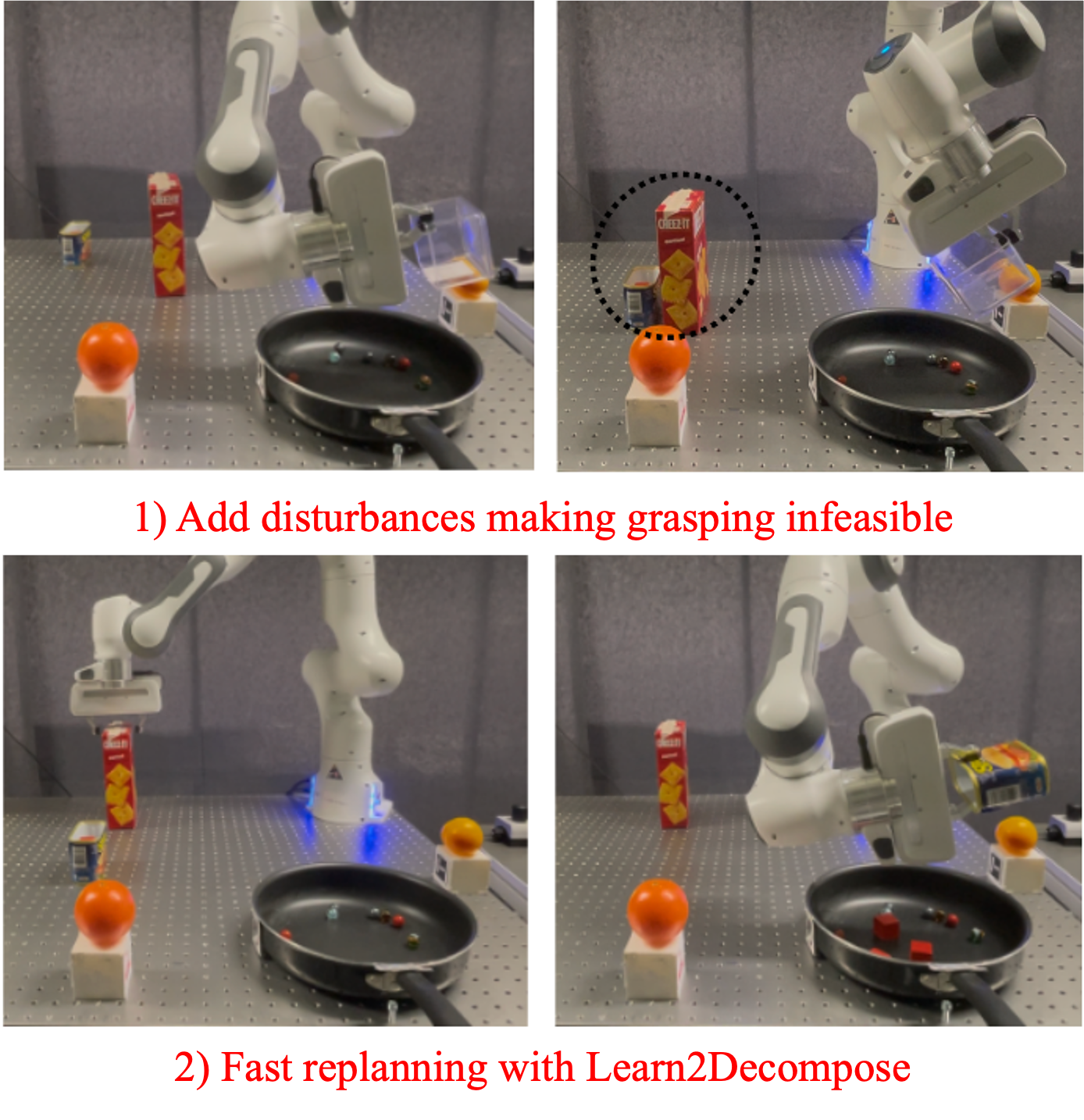
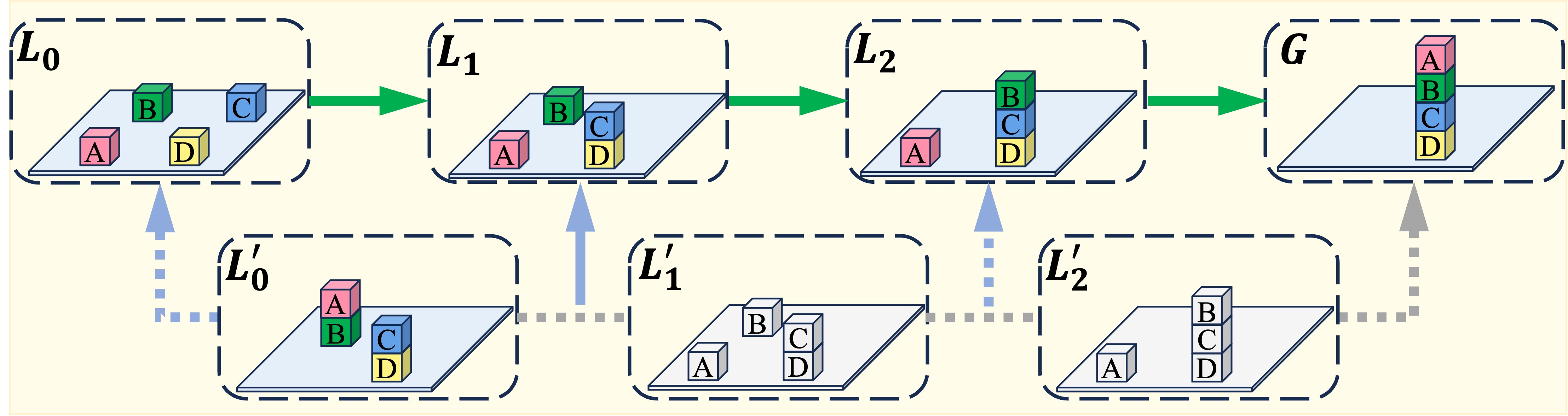
- 2025.10: Our paper Learn2Decompose is accepted to IEEE RA-L!
- 2024.08: Our paper LogicLfD is accepted to IEEE RA-L!
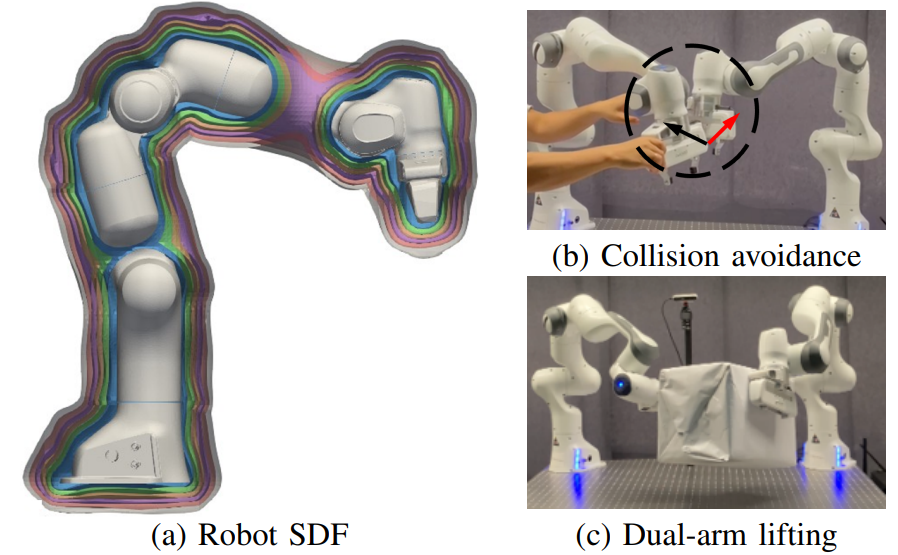
- 2024.01: Our paper Robot Distance Fields is accepted to ICRA 2024!
Selected Publications
Please visit the Publications page for more details.